- 您好!欢迎来到机器人之家


- 升级网销通

- 400-6767-076

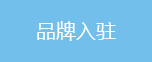











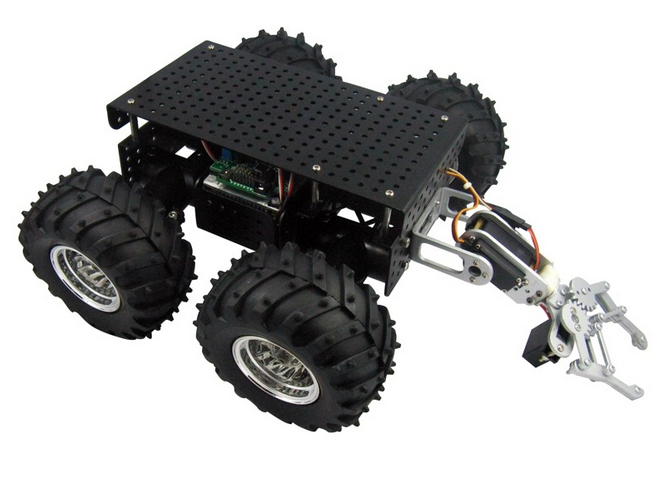
板尺寸:120*227mm
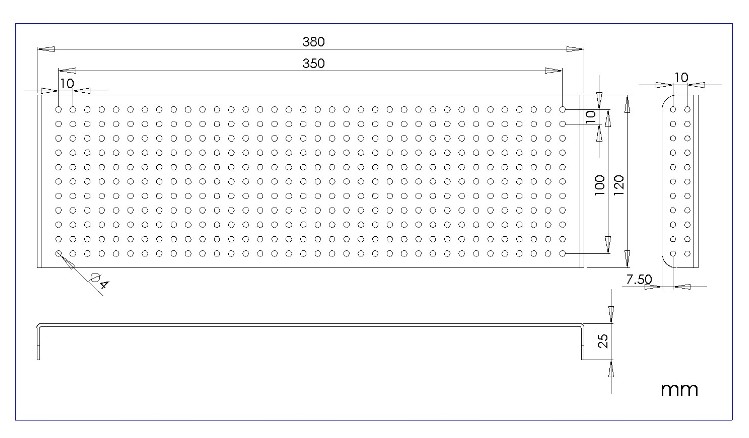
大脚轮:Φ125
4WD整体尺寸(不含机械臂):280*310*140
机械臂自由度:2
爪子最大张角:50
机械臂整体长度(爪子最大张角时):192
爪子在4WD车体上的固定位置的中心点高度:75
车体最大拉力:5KG




尺寸图:

可选配控制器:
宝贝详情
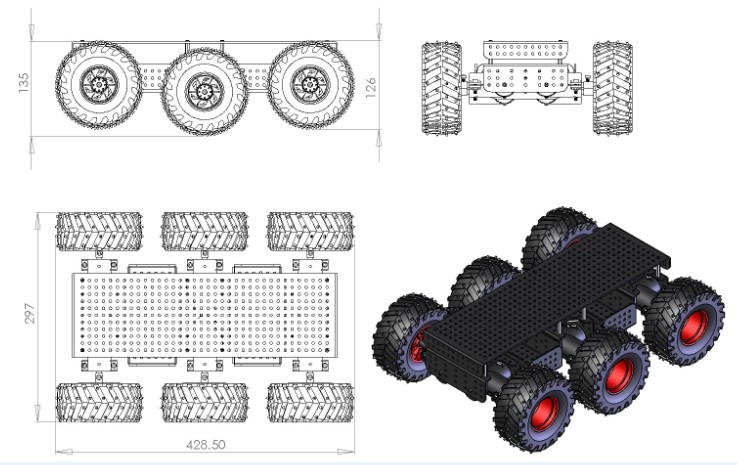
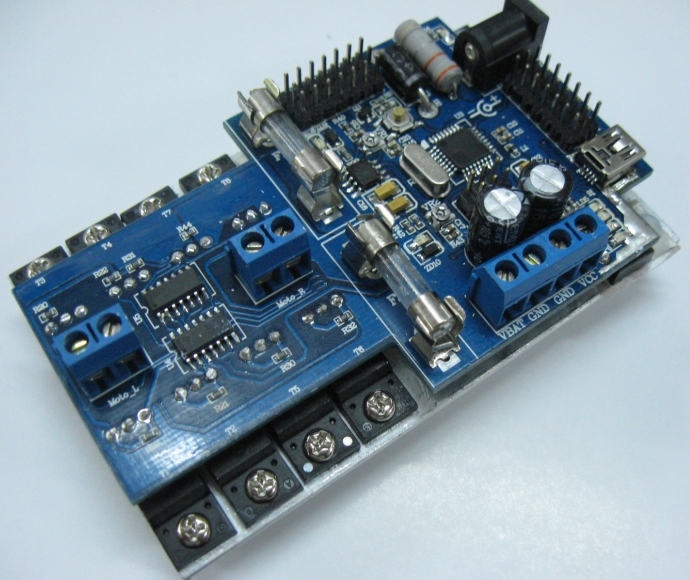
6WD/4WD,全球最大功率马达驱动板,有散热功支持ISP下载,arduino也可以编译
搜救机器人控制器,兼容AVR和Arduino等微控器,能让机器人有效运行。尽管这款控制器尺寸较小,但具有多种功能:prefix = o ns = "urn:schemas-microsoft-com:office:office"
l 双15A持续FET“H”桥,带独立保险丝
l 两个H桥有电流反应装置
l 处理器和显示LED可探测保险丝是否熔断
l 7pin I/O端口带3pin插针头,可以用来直接插电机
l 5个模块输入端口带3pin插针头,为感应器供电
l 5A的LDO稳压器为逻辑电路,电机和感应器供电
l 2A的DC电源插孔用来测试,输入程序和充电
l SLA, NiCd和NiMh电池可以通过2A的电流稳压器充电
l 处理器可以检测电池电压,并且控制充电线路
l 可以配用USB,TTL串口线和12C,也可以与RC和模块输入同时操作
l Atmega 168控制器带16K内存
l 带有Arduino和AVR兼容性,通过USB或ISP接口输入程序
l 芯片已经预带Arduino boot loader和软件
这是一款低压控制器,由7.2V镍氢电池供电。高电池电压(最大18V DC)也可以用,但是会降低5V稳压器的最大电流输出。如果有必要,可以在散热片上安装一个小型CPU风扇。
附带软件
控制器出货时会带有Arduino bootloader和基本软件,使其可以利用当时所应用的电源运行。
将一个带有无线控制接收器的简单马达控制器插进D0和D1,就可以进行故障调试。注意信号线是对着芯片的,+5V在中间,地线在外面。所有3pin接头都可以应用。

如果电池电压太低(大约6V),那么控制器会自动断开防止运转失常,电池充电电路也开始运行。如果DC电压比名以上用于充电接口的电压高3-6V,电池便开始充电,直到电压水平达到峰点(delta V),这时充电器会变成慢充模式,直到断开终端电源。
使用电脑,USB,或者另一个芯片连接到D0(RX)和D1(TX),示例软件可以支持以下这些基本串口命令:
l “FL”会刷平缓冲区。电源打开和接受到无效命令时,这种情况会自动发生。
l “AN”要求模块数据。接收到10字节之后,模块的“高”和“低”字节输入1-5.
l “SV”跟踪uS中7个电机位置的“高”和“低”字节,必须发送14字节数据。
l 跟踪4字节数据的“HB”会设置每个H桥的模式(0-2)和电源(0-255)。
使用Arduino环境
附带软件也支持基本串口命令,用来控制马达,电机和读取模块输入。这些特征可以通过使用Arduino0018或者从http://arduino.cc/上免费下载程序来实现。
控制器不能由USB接口直接供电,必须由电池或DC供电电源(6-12V)来供电。如果使用DC接口,可以通过充电线路来限制电流。
控制器接通电源后,通过USB线连接到电脑上,可以根据自己的需要调整或编辑程序。
下载并安装Arduino环境,然后打开名为“Wild_Thumper_Controller.pde”的文件。要在Arduino环境中编辑附带软件或上传新软件,首先必须要在窗口上端的工具条上选择正确的串联接口和板的类型。板的类型应选择“Nano w/ ATmega 168”。

大家在程序的上方会看到有三个标签,分别是“Wild_Thumper_Controller”, “Constants.h”和“Iopins.h”。
“Wild_Thumper_Controller”包含的是主程序。大家可以根据自己的需要进行调整,控制器的大脑也就是机器人的头脑。
“Constants.h”标签储存一些值,例如交流模式,波特率,最小电池电压以及最大消耗电流等。
“I/Opins.h”标签主要是告知程序哪个芯片的I/O针用于哪种功能。修改标签内容的时候一定要非常小心,因为PCB上很多种功能都是硬体连接。
调试控制器
若在“Constants.h”标签中进行一些简单的修改,控制器可被调节到接受串联交流,用不同的电池充电,以及防止不同的马达超载。
例如,将“Cmode”的值调到1,会将交流模式赚到串联。将“Brate”调到喜欢的波特率:300, 1200, 2400, 9600, 14400, 19200, 28800, 38400, 57600 or 115200。

附带软件是根据7.2V镍氢电池编写的,若要使用其它电池,程序必须要修改。此充电器千万不要使用LiPo或Li-ion电池!如果大家不确定自己使用的是哪种电池,那么最好不要使用这块板上的可充电功能。
电池监测线路会在每伏电压穿过电池的时候报告一个测试值,大约65。“低压”值代表控制器断开需要充电时的电压值,所以410/65表示断电电压为大约6.3V。“电池电压”值表示名义上的电池电压。程序利用这个来决定达到峰点的最小电压是多少。
作为选择,也可以使用6节NiMh或NiCd 5号电池(UM-3)。虽然充电线路本来是设计为释放2A电流,但并不推荐大家使用这些小电池,因为电压在应用于充电接口时会减少,电流也因此会减少。
调试马达电流值
控制器使用2个15A缓动式熔断器来保护H桥,双重保险丝可以当做分流器,既可以让处理器监测马达所消耗的电流,也可以避免危险的高堵转电流。
如果超过安全电流水平,示例程序会停止运行马达。这样同样也可以保护保险丝。如果一个保险丝断掉,那么它旁边的显示LED灯会亮,然后程序会记载一个比普通堵转电流更高的电流水平,即使是在低PWM水平的情况下。
调试电流感应器,需要一个10A范围的万用表和一个稳定的测试负载物,比如汽车上的灯泡或者高瓦数电阻,10欧,5瓦或者更高。

通过电池接口,将控制器连接到电池或DC电源上。然后通过数据线连接到电脑上。载入并运行“Wild_Thumper_Diagnostic.pde”程序。点击“Serial Monitor”命令,大家会看到处理器已经开始在测量负载物了。如果移开保险丝,会看到电流值跳到了700以上。这是最高的可行值。
换掉保险丝,并且根据自己所调试的马达输出来调节VR1和VR2.例如:
万用表连接到左边的马达,电流值为940mA。
调节VR1,直到处理器读到的值为47.
左边马达现在调节到的值大约为20mA(47x20mA=940mA)。
马达的堵转电流为12Amps.为保护马达,就将11A定位安全限制值。
在“Constants.h”标签中,将“Leftmaxamps”定位550(11000mA / 20mA)。
发生超负荷情况之后,在马达能重启之前将“overloadtime”设置为mS要求的数字。默认值为100mS(每秒1/10)。




- 中山市大谷电子科技有限公司
- [诚信档案]

- 联系人:黎先生(先生)
- 用 户: [当前离线][加为好友][发送信息]
- 电 话: 0760-88811951
- 手 机: 15019528638
- 邮 箱: tyler_yan@aliyun.com
- 地 址: 中山南区第二工业区文明路25~29号4..



