- 您好!欢迎来到机器人之家


- 升级网销通

- 400-6767-076











产品介绍
应用领域
功能特点
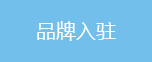
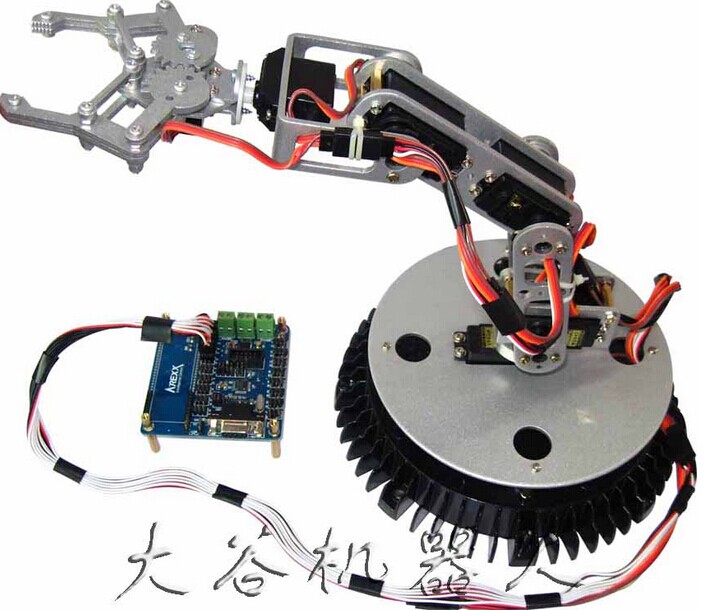
伺服机器手臂,顾名思义,是由六个伺服电机驱动的机器手臂。既然是手臂,那么就有几个关节,大家可以联想到,我们人类的手臂,除了肩、肘、腕这三个关节外,再加上手指的关节,就有很多个关节了。那么我们这个机器手臂也是一样,用6个伺服电机实现了一个手的简单结构,除了没有人那么多的关节外,还缺少一些神经组织和神经系统,然而,具有“灵巧手”(可完成复杂装配、搬运或仿人手抓取鸡蛋)的“仿人形”机器人乃机器人研究的前沿。
而我们的6个伺服机器,以巧妙的机械结构,结合它的控制系统,展示了6自由度机器手动作的控制原理。它采用3个13kg扭力的金属齿轮、一个3.2kg、两个2.3kg的伺服和一些精密的铝合金加工组件组合而成。目前,我公司的机器手臂以390mm长度的为主,使用32路控制器来控制机器手臂的运行动作,本控制器采用atmega168 MCU,和电脑RS232串口通讯,可同时控制32颗伺服电机,双电源供电(6~12V单片机供电,4.8~6V伺服电机供电[伺服电机供电分别设有1-16路和17-32路供电端口]),同时还设有wi-fi无线控制模块,预留ISP下载口,用STK500 ISP下载线便可以下载MCU控制程序。
以下是32路伺服电机控制系统界面:




这套机器手臂,无论是robot fans做个人开发还是学生参赛,都是机器人爱好的合适的教育平台。







公司信息
- 中山市大谷电子科技有限公司
- [诚信档案]

- 联系人:黎先生(先生)
- 用 户: [当前离线][加为好友][发送信息]
- 电 话: 0760-88811951
- 手 机: 15019528638
- 邮 箱: tyler_yan@aliyun.com
- 地 址: 中山南区第二工业区文明路25~29号4..
推荐产品



