- 您好!欢迎来到机器人之家


- 升级网销通

- 400-6767-076










产品介绍
应用领域
功能特点
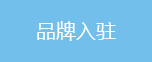
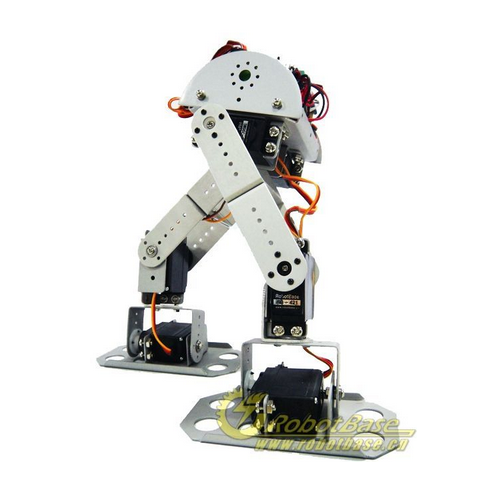
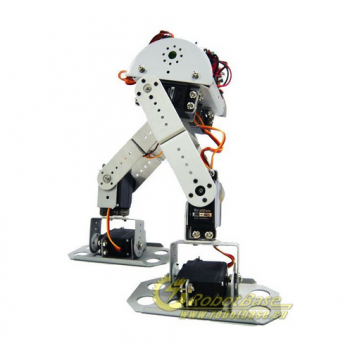
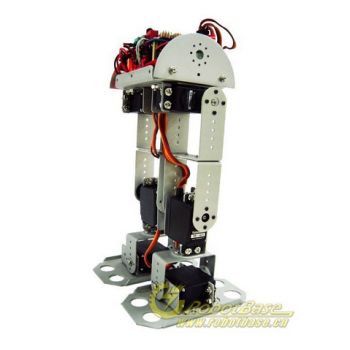
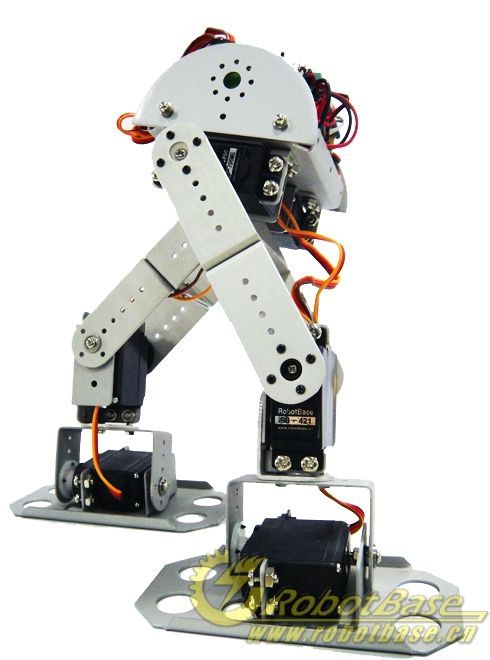
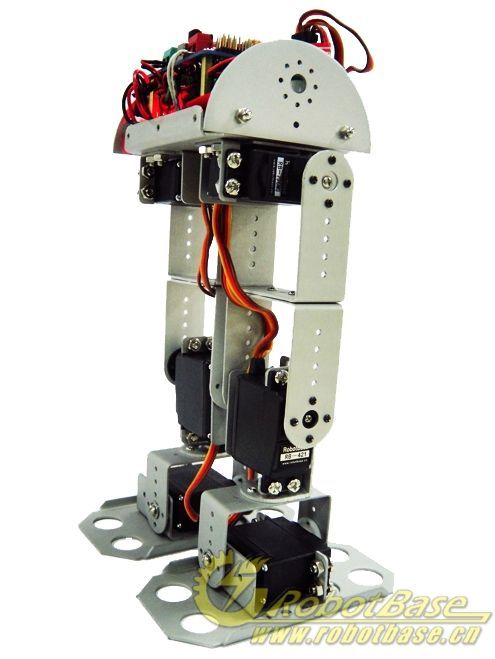
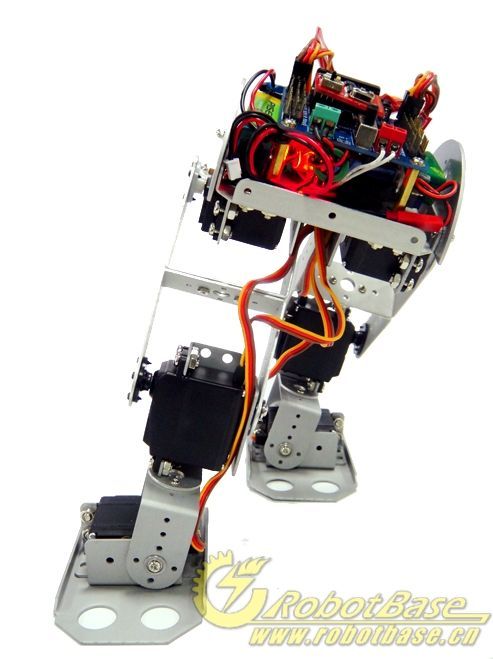
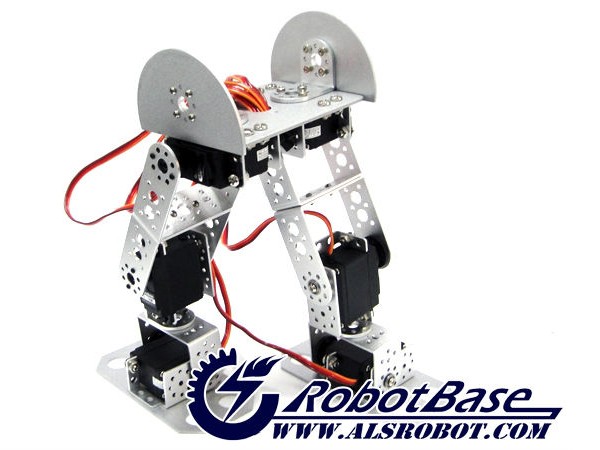
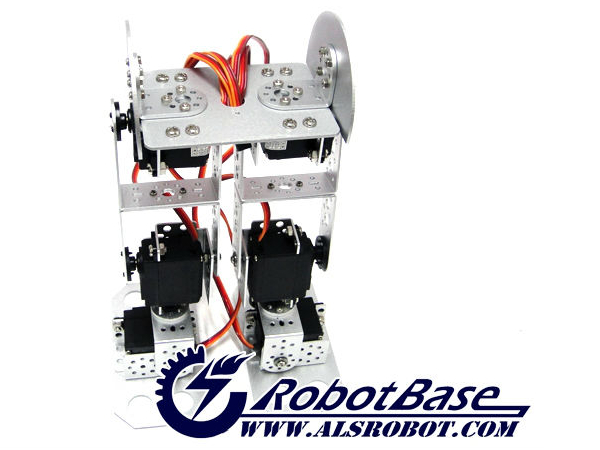
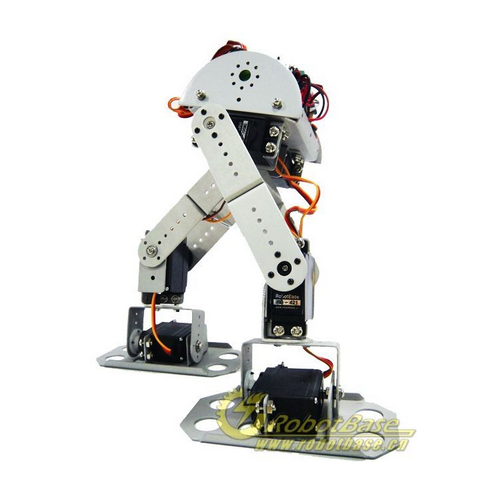
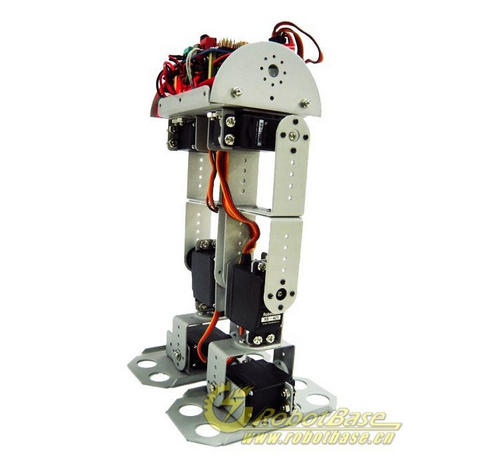
AS-6DOF Biped 六自由度双足竞步机器人是一款全铝合金零件组成的专业小型仿人型机器人,零件表面特殊有色氧化工艺处理,边缘光滑不伤手,保证金属原色,美观耐用,防止长时间使用脱色。 整机具有6个微伺服舵机,每足3个自由度,该机器人不仅可以向前向后步行,还可以原地下蹲、起立、左右转向,甚至可以做很多类人型机器人前滚翻、后滚翻等特技动作。脚板专门根据反向膝腿原理设计,足弓打孔、四边切角,以减轻足重,足孔可以加装脚底传感器,进行步态检测;腿部采用加长直腿结构,提高行走速度,有利于Robocup双足机器人比赛;腰间宽敞可搭载各种传感器和视觉识别系统,完成图像追踪定位等功能。



公司信息
- 哈尔滨奥松机器人科技有限公司
- [诚信档案]

- 联系人:李小姐(女士)
- 用 户: [当前离线][加为好友][发送信息]
- 电 话: 0451-86628691
- 手 机: 18945688768
- 邮 箱: robotbase@aliyun.com
- 地 址: 哈尔滨市香坊区衡山路18号远东大厦C..
推荐产品



